IR Distance Sensors
One of the most important things an autonomous robot must be able to do is see and understand its surroundings. There are many ways to accomplish this. If you have a lot of time or money to blow, you could use LIDAR or vision processing but these systems are often unnecessary.

In the past, I have used the ever-popular HC-SR04 ultrasonic distance sensor modules, however for an upcoming project I need something less bulky and more precise. I want to use IR distance sensors. IR distance sensors have two main components, an IR LED and an IR phototransistor. The LED shines on a nearby surface while the phototransistor measures how much of the IR light bounces back. A while back I bought some digital IR distance sensors off amazon but I needed an analog sensor. I cannibalized an LED and phototransistor from one of the Amazon modules and built a prototype. Here is my schematic:
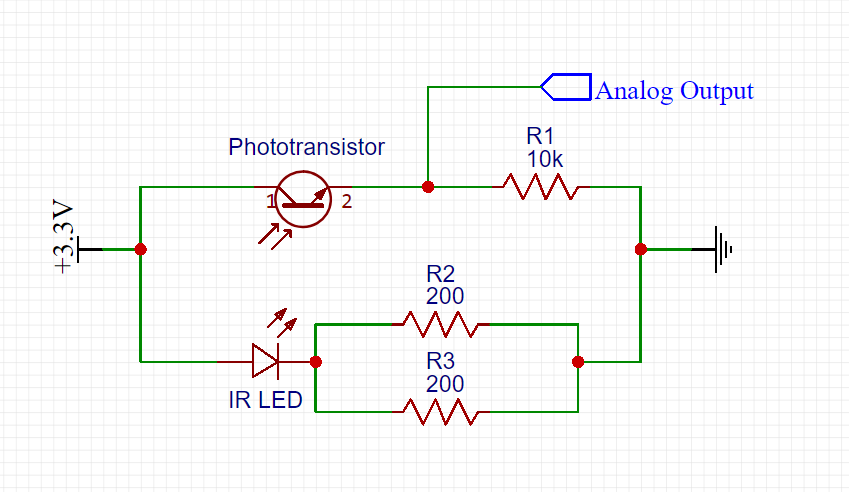
I didn’t have any 100-ohm resistors so I used two 200-ohm resistors in parallel. Here is the sensor:
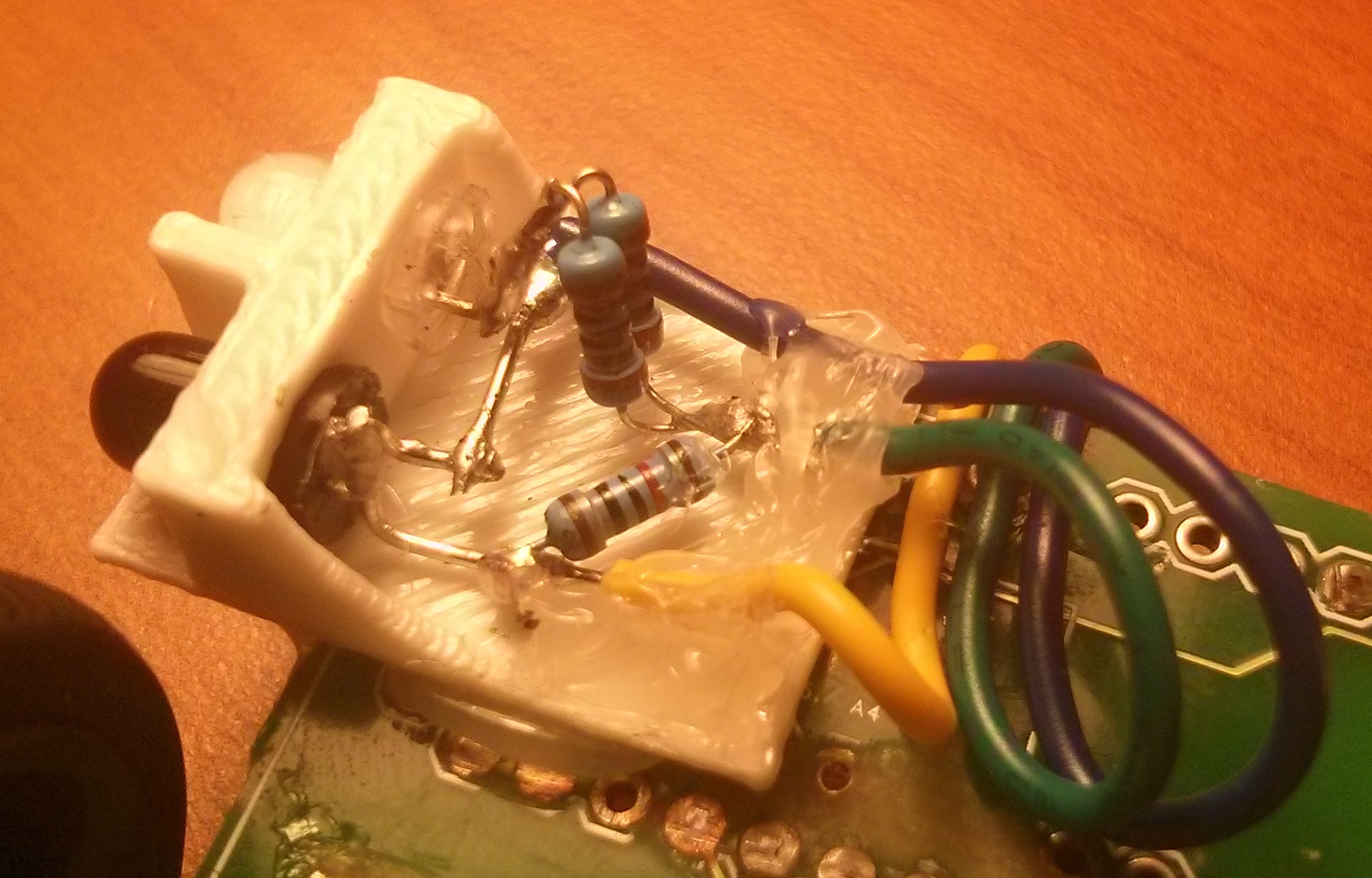
3.3V is blue, GND is green, and analog out is yellow. I know my colors are all wrong, but I was working with what I had.
The output from an IR distance sensor is not useful because the output is inversely proportional to the distance it measures. To get useful output data I roughly followed the steps on this webpage. Basically, you can convert the analog data into distance using this equation:
distance = (1 / (a * analogIn + b)) - k
I wasn’t super concerned about precision in this proof of concept so to find a, b, and k, I measured some known distances and recorded the corresponding analog output:
| Analog value (0-1023) | Distance (mm) |
|---|---|
| 971 | 20 |
| 810 | 25 |
| 440 | 60 |
| 270 | 120 |
| 210 | 240 |
| 192 | 300 |
I set up the data, variables, and distance function in a desmos plot and adjusted my a, b and k until the plot fit the points:
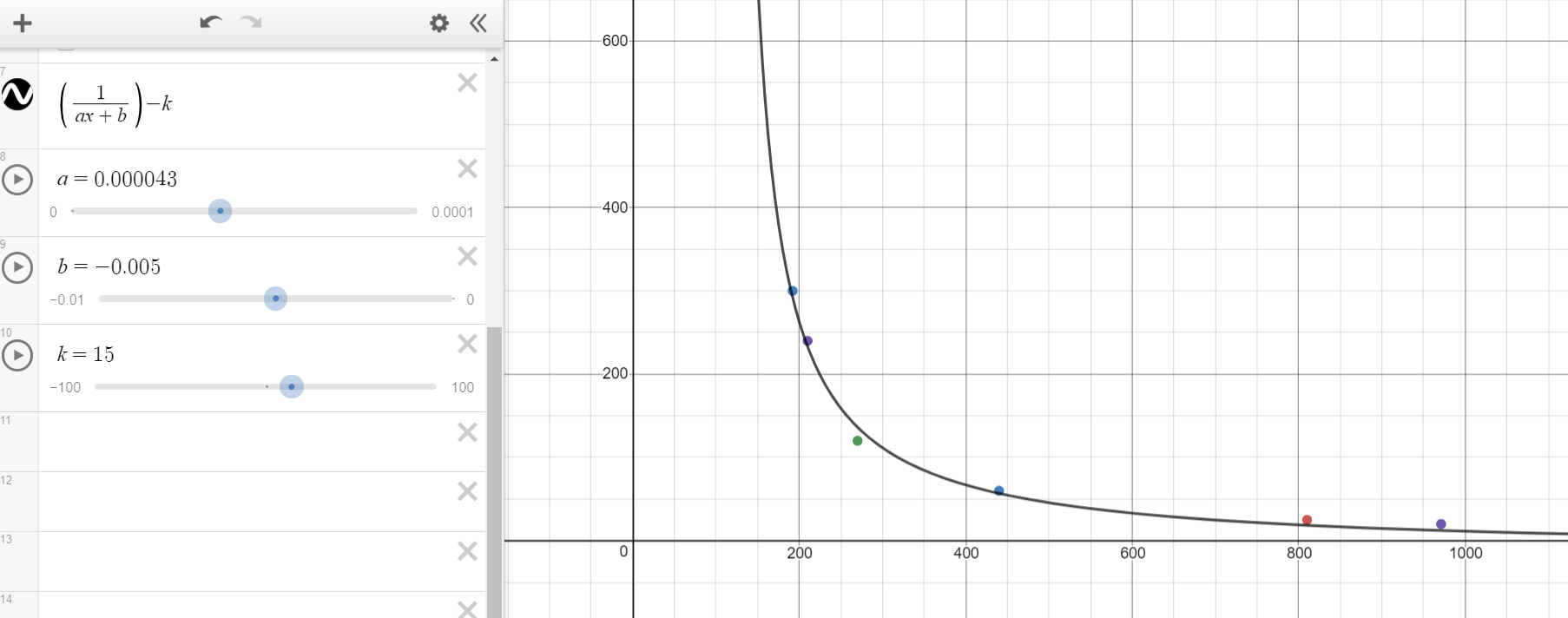
I ended up with a = 0.000043, b = -0.005, and k = 15. In order to make the calculation a little easier on your microcontroller the roboticlab page recommened rearanging some of the terms:
| distance = (1 / (a * analogIn + b)) - k |
| distance = (1 / a) / (analogIn + B / a) - k |
| solving for 1/a and B/a, I got this final formula: |
| distance = (16667 / (analogIn - 133)) + 15 |
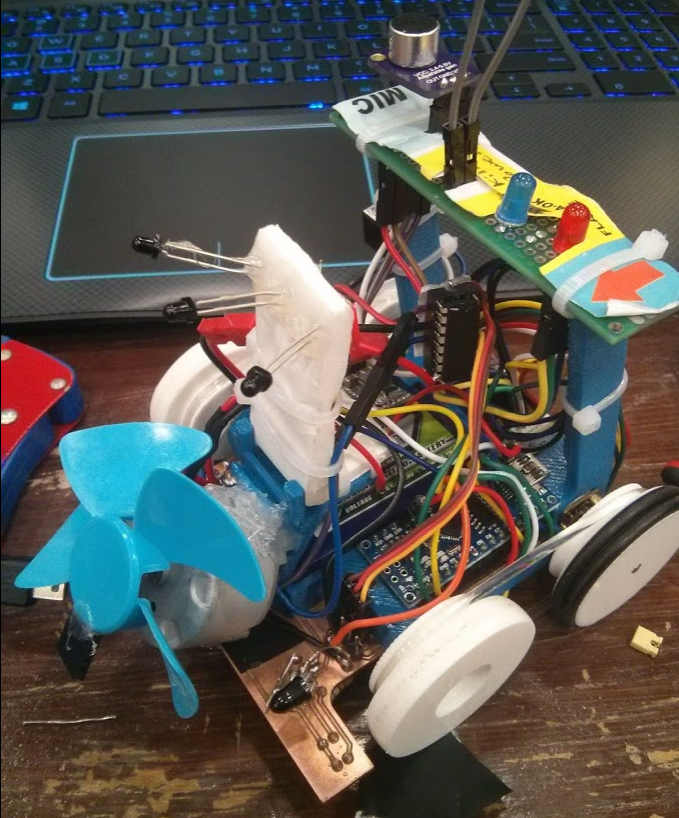
Now that I was reading distance (which was pretty cool by itself) I wanted to implement it on a robot. This chassis is from a previous project, a fairyweight combat robot with a custom controls system. I plan to one day document that project on this blog, but for now just know that it uses an Arduino Pro Mini as the “brain” and an L293D dual H-bridge for driving the motors (these components are underneath the robot).
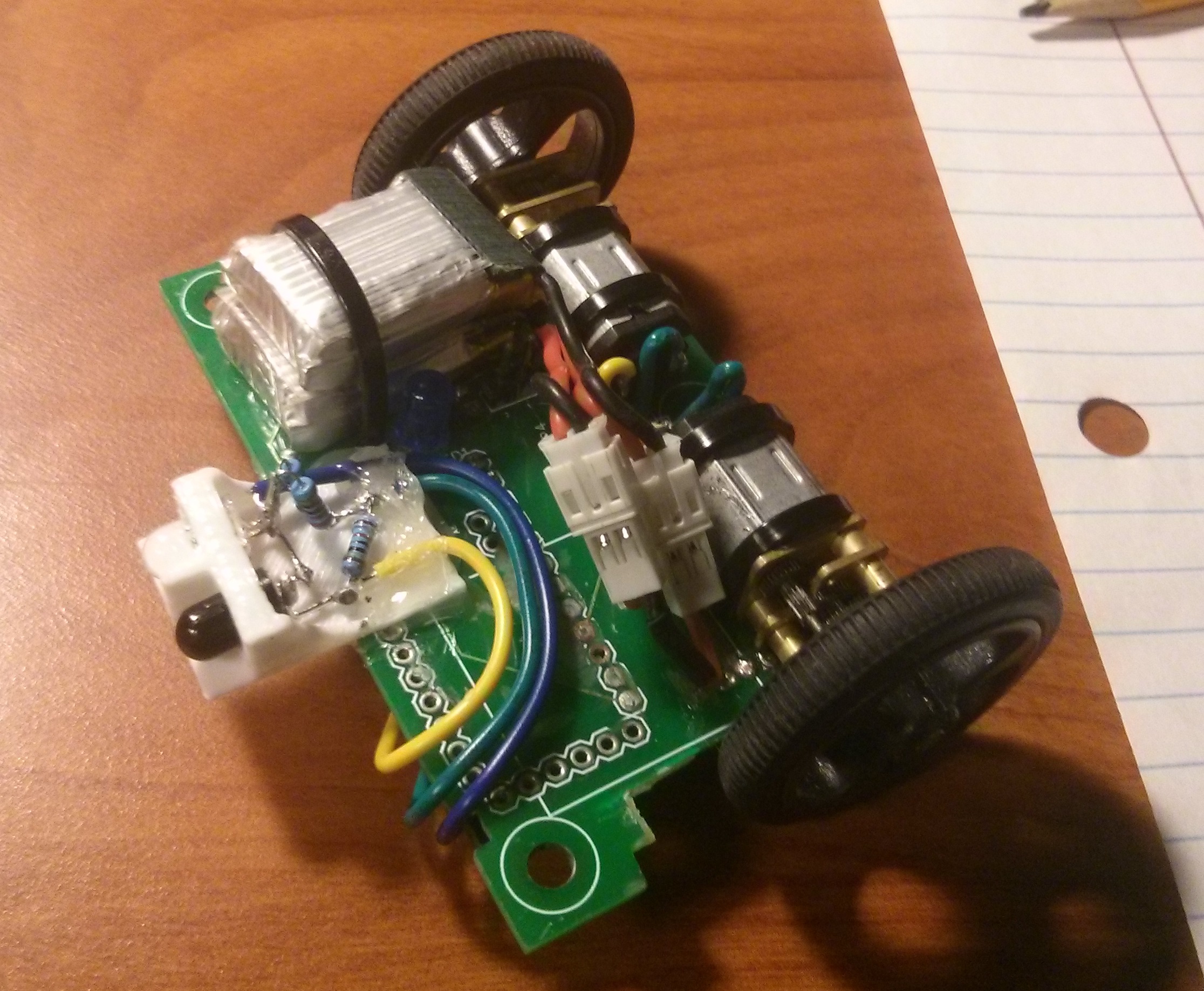
In the first test, I wanted to have the robot maintain a constant distance from whatever was in front of it. It drove forward until it was 20mm from a wall if it became closer than 20mm it would back up. This is called bang-bang control and it was essentially useless as the robot oscillated dramatically. To improve performance I switched it to a PD loop and added a rolling average for the analog inputs. This produced much better results.
There is a lot that can be improved but for now, I am going to call this a success, in my next test I am going to rotate the sensor 90 degrees and see if I can get it to follow a wall while remaining a constant distance from it.